By day, I solve robotics problems to reduce herbicide usage and improve yield for farmers.
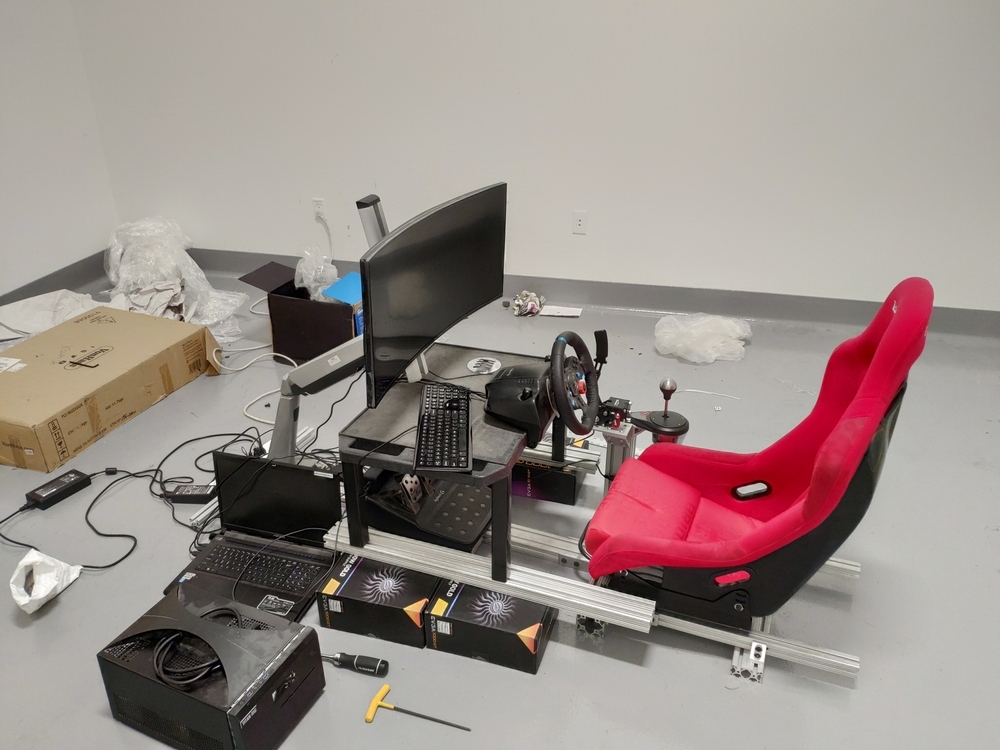
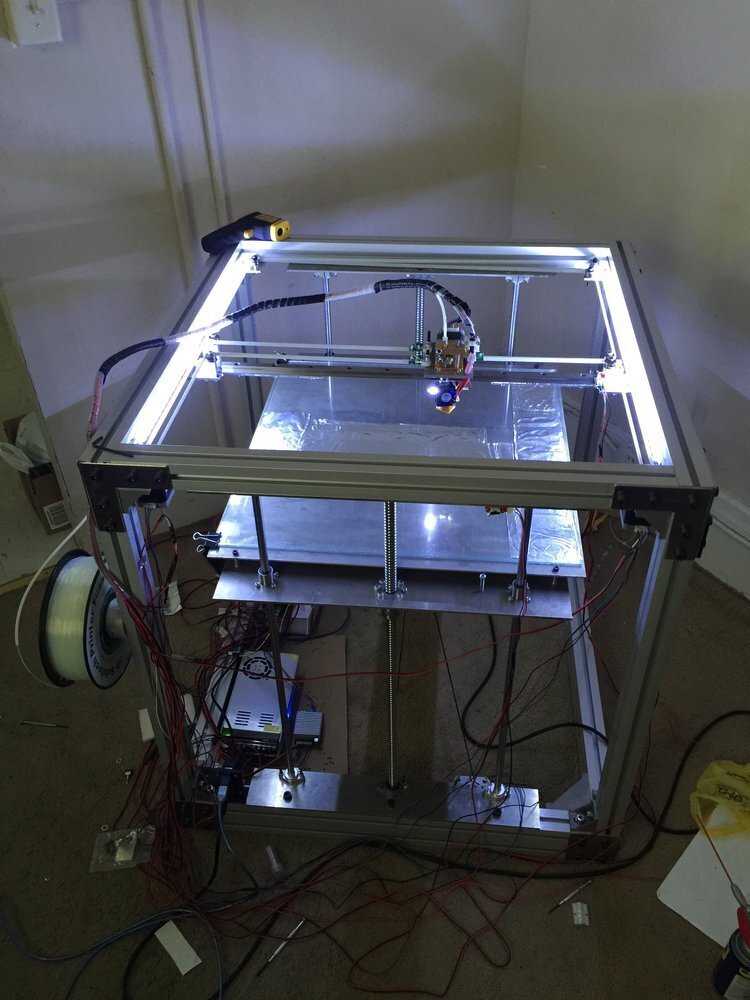
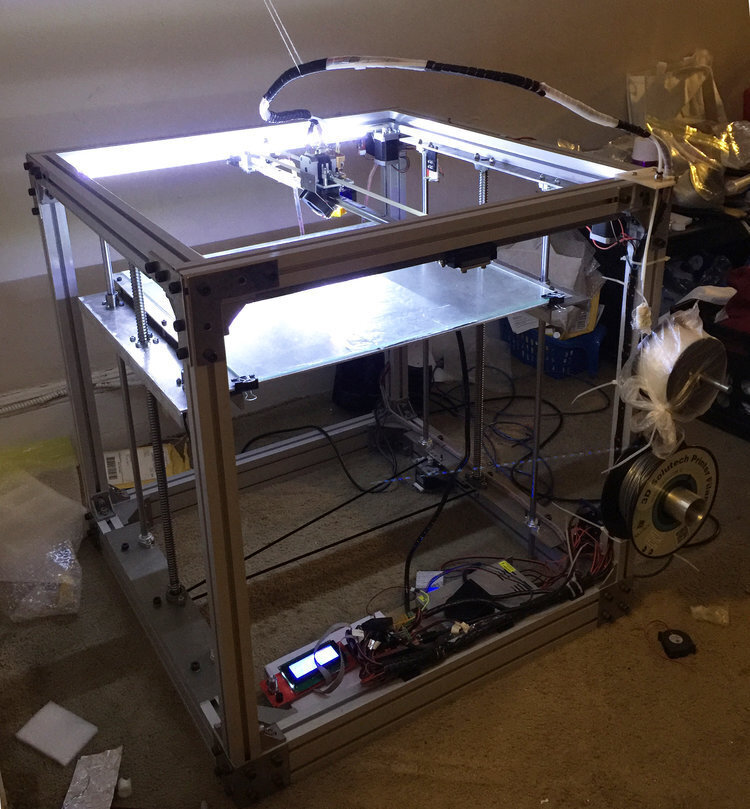
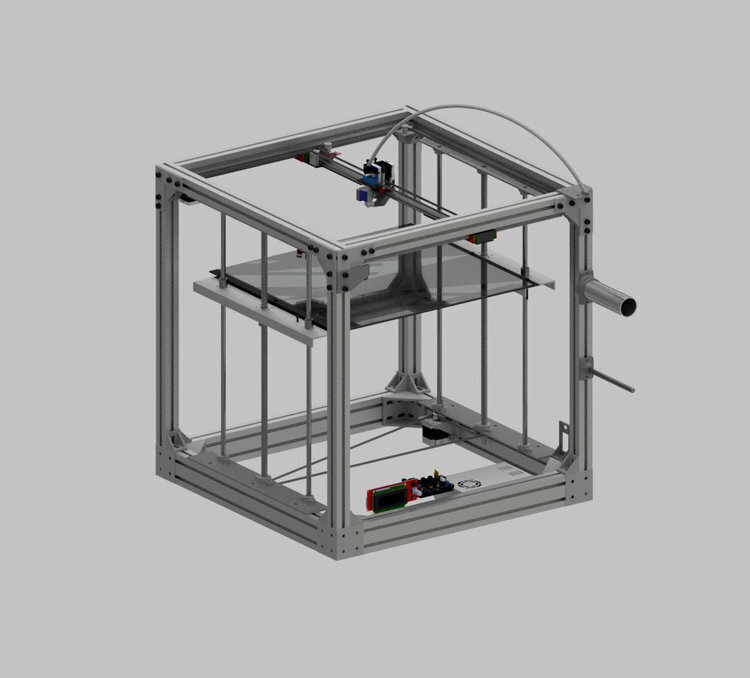
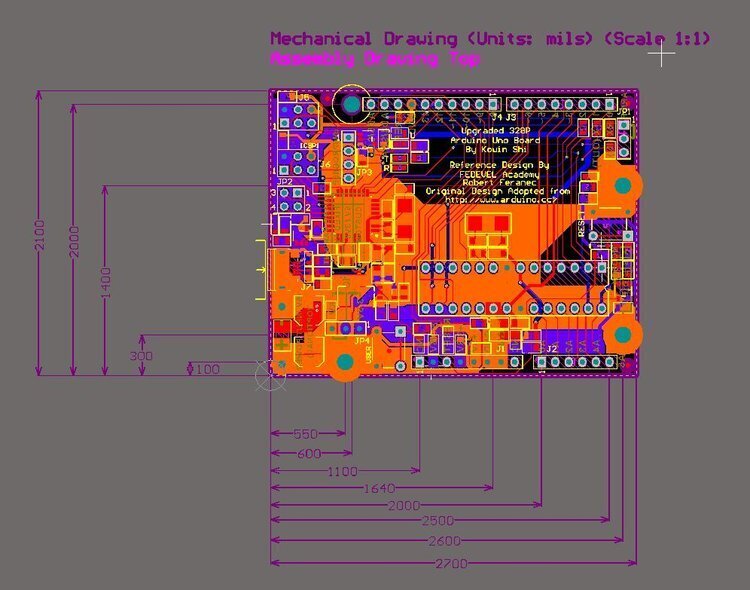
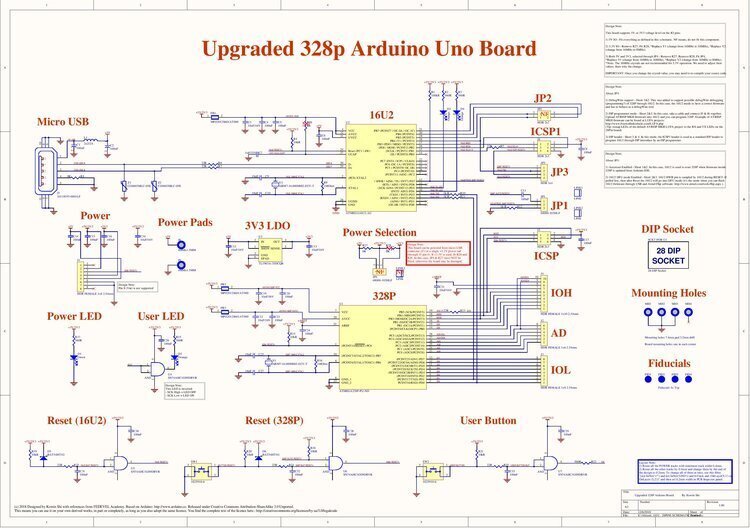
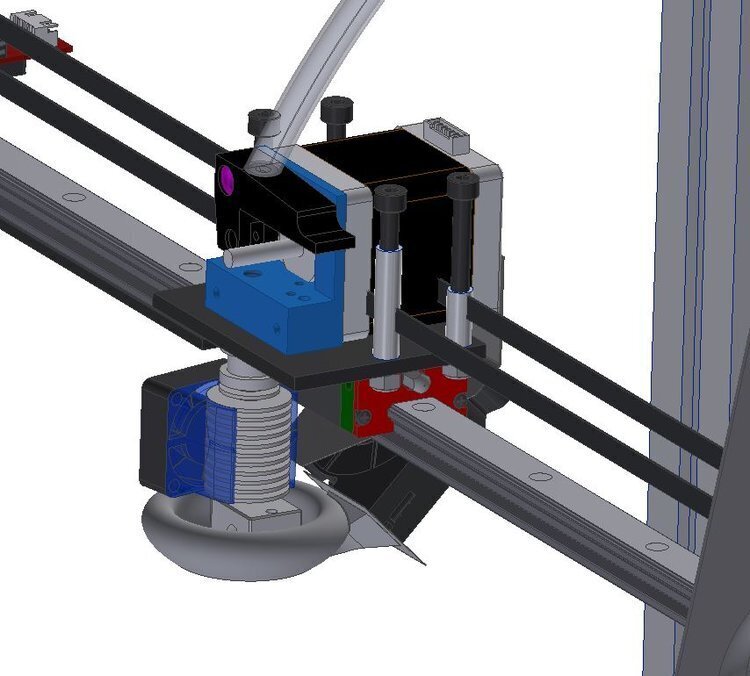
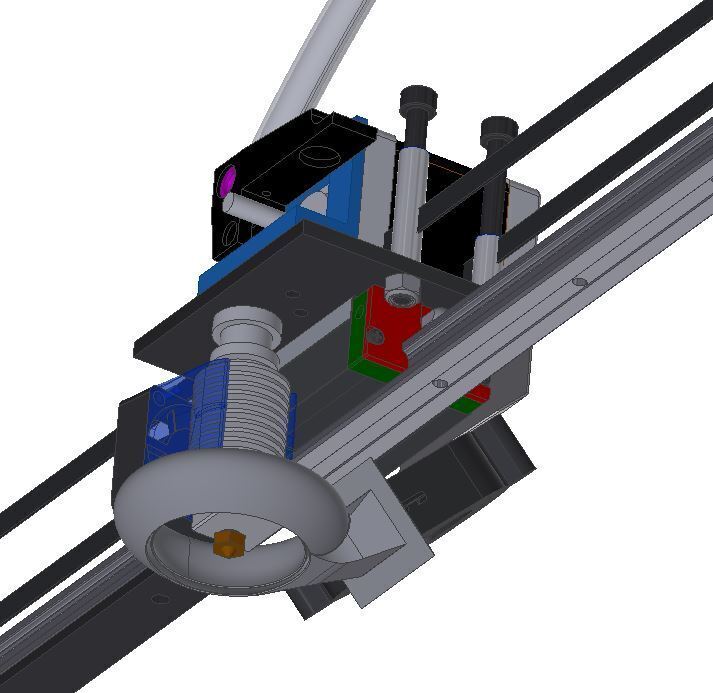
By night, I work on a diverse selection of projects, including custom 3D printers, racing sims, machine learning, financial analysis, and this website.
I grew up in China and Canada, but have spent the last decade in the United States.
I currently reside in Bay Area CA.
My Journey
Education
- Cornell University
- B.S. in Mechanical Engineering, Minor in ECE
- Master of Engineering in ECE
Past
- Amazon, Prime Air
- Aurora Innovation, Compute Design Team
- Uber ATG, Modules Team (Acquired by Aurora)
- Tesla, Power Electronics Test Team
- Tesla, Motor Design Team
- GAC Automotive Engineering Institute
Present
- Blue River Technology (John Deere)
- Mechatronics Engineer
Skills (Years of Experience)
Hardware
- Mechanical CAD/CAM ()
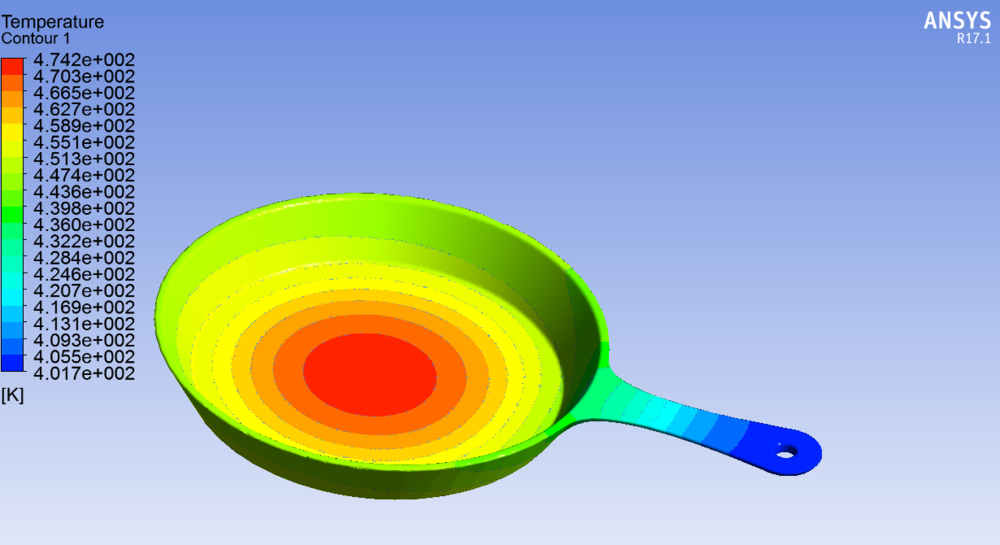
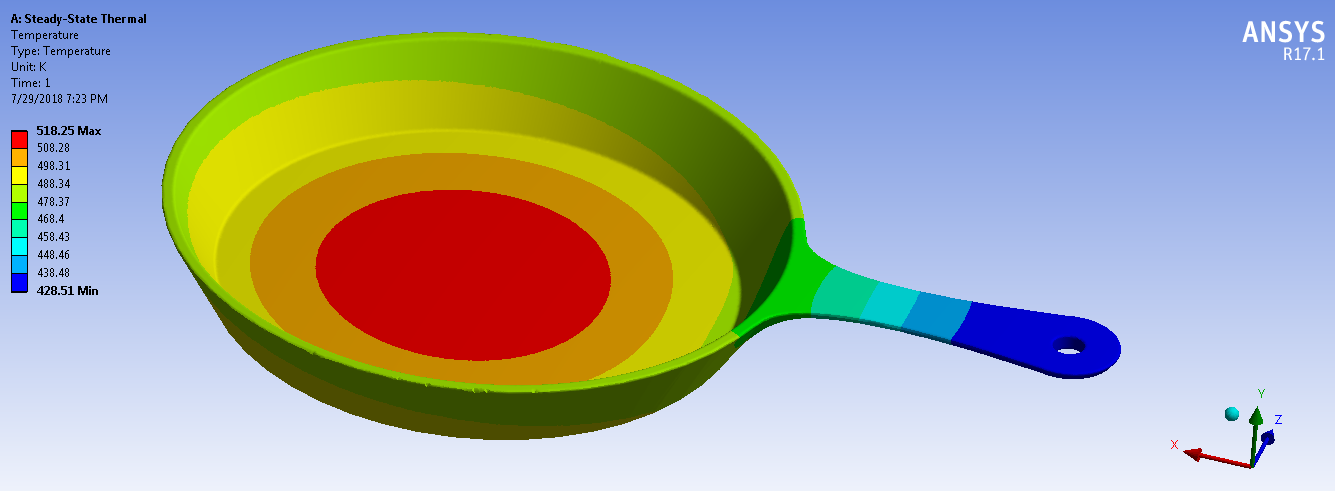
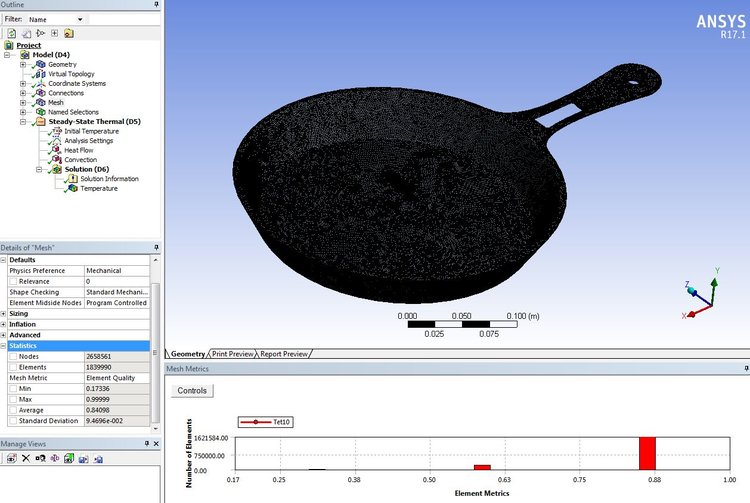
- Structural/CFD/Heat Transfer Simulation ()
- Electrical CAD, PCBA Bringup ()
- Automotive Harness Design ()
- Mass Manufacturing/Injection Molding ()
- Machining and Welding ()
- 3D Printing ()
- Electro-Mechanical Integration ()
- Battery Design ()
- Electrical/ICE Vehicle Systems Design ()
- Robotics Systems Design ()
- Testing and Validation ()
- GD&T ()
Software
- Python ()
- C/C++ ()
- Verilog ()
- Linux ()
- Embedded Systems (3)
- Java (1)
- PLC Ladder Logic (2)
- ROS ()
- HTML/CSS/Javascript ()
- Robotics Algorithms ()
- Optimal Control Algorithms (2)
- Machine Learning Algorithms/Frameworks (2)
- Hardware Acceleration, CUDA (1)
Misc
- Mandarin (Native Proficiency)
- Spanish (Limited Working Proficiency)
- Financial Analysis (3)
Tools I Use